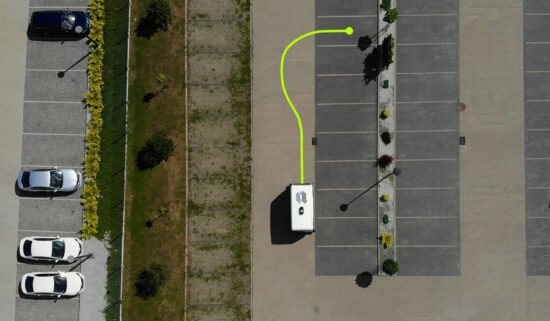
Skuteczne sterowanie pojazdem autonomicznym zależy od wielu czynników. Jednym z nich jest możliwość wyznaczania pożądanej trajektorii, a więc planowania ścieżki. Zadana trajektoria stanowi aktualną pożądaną ścieżkę ruchu w krótkim horyzoncie czasu. Jej kształt powinien być wyznaczany na bieżąco, adaptując się do zmiennych warunków otoczenia.
Wyznaczanie trajektorii pojazdu
Wyznaczanie trajektorii pojazdu stanowi warstwę sterowania nadrzędnego, która uwzględniając model ruchu pojazdu, jego ograniczenia, a także aktualne warunki otoczenia (lokalizację przeszkód, predykcję ruchu innych uczestników drogi) oraz mapy HD (w tym rozszerzone informacje o rzeczywistości, jak np. pasy ruchu i zasady poruszania się po nich, semantykę znaków drogowych), tworzy ścieżkę po której powinien poruszać się pojazd, wraz z zadaną prędkością chwilową na danym odcinku.
Zagadnienie wyznaczania trajektorii może pojawić się także przy predykcji zachowań uczestników ruchu. Trajektoria ta będzie jednak jedynie najbardziej prawdopodobnym modelem opisującym ruch wybranego obiektu.