Algorytm lokalizacji pojazdu jest odpowiedzialny za określenie pozycji samochodu względem wybranego układu odniesienia. Algorytmy lokalizacji możemy podzielić na 2 kategorie: relatywny oraz absolutny układ odniesienia.
W przypadku lokalizacji relatywnej, położenie samochodu jest określane w lokalnym układzie współrzędnych, który może być umieszczony w punkcie startu pojazdu lub może być zaczepiony do samochodu i przesuwać się razem z nim. Układ współrzędnych zaczepiony do środka transportu, pozwala na rozpoznawanie i śledzenie pasów ruchu oraz na wykrywanie przeszkód względem pojazdu. Dzięki takiej lokalizacji samochód może poruszać się autonomicznie wskazaną drogą oraz wykonywać podstawowe manewry takie jak wyprzedzania, dostosowanie prędkości do poprzedzającego go pojazdu czy unikanie kolizji.
Korzystając z tego typu lokalizacji, nie jest możliwe podejmowanie przez samochód decyzji o wyborze drogi na skrzyżowaniu lub zjazdu na autostradzie. Brak informacji o lokalizacji względem mapy nie pozwala na realizację zadania jazdy do wyznaczonego celu.
Lokalizacja absolutna określa położenie względem globalnego układu współrzędnych Ziemi, co pozwala na zaplanowanie trasy do punktu docelowego, a więc umożliwia realizację zadań wymaganych na 5 poziomie autonomii.
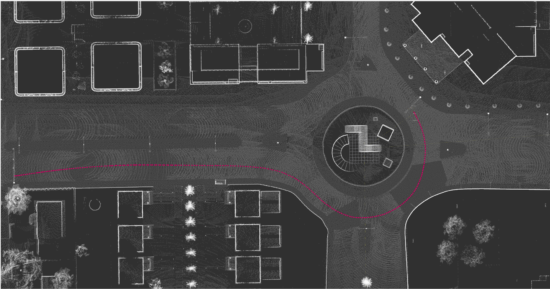
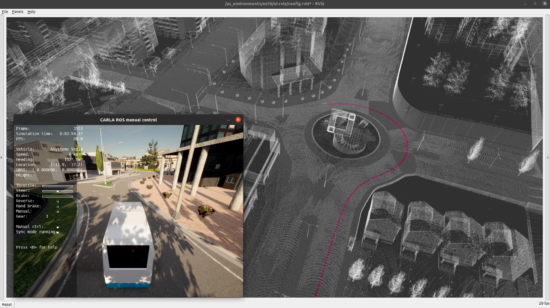
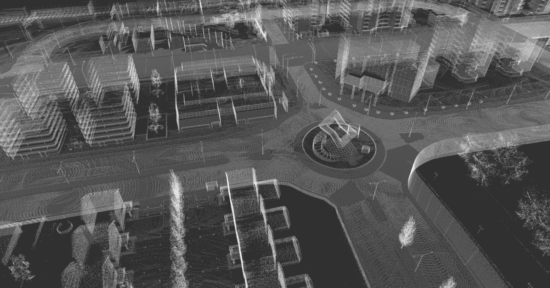
Korzystając z lokalizacji absolutnej, możliwe jest wcześniejsze przygotowanie szczegółowej mapy terenu, która później zostanie wykorzystana do określania pozycji. Na przykład można taką mapę zbudować za pomocą lidaru. Taka mapa będzie reprezentowała trójwymiarową strukturę otoczenia.
Określenie dokładnej lokalizacji pojazdu jest wymagającym zadaniem, które nie może być zrealizowane za pomocą pojedynczego czujnika, ponieważ nie istnieje czujnik idealny, który zawsze wskazuje dokładną pozycję, dlatego konieczne jest zastosowanie wielu czujników, które się wzajemnie uzupełniają.
W przypadku algorytmu lokalizacji często stosowanymi czujnikami są prędkościomierz, moduł GNSS, kamery, lidar, czujnik IMU. Dane z tych czujników mają różną dokładność oraz różną charakterystykę błędów, dlatego koniecznej jest zastosowanie algorytmów fuzji danych, takich jak np. filtr Kalmana.