Successful control over an autonomous vehicle depends on multiple factors. One of them is the ability to determine a desired trajectory, i.e., path planning. The set trajectory is the currently desired path of movement over a short period of time. Its shape should be determined on an ongoing basis, adapting it to changing environmental conditions.
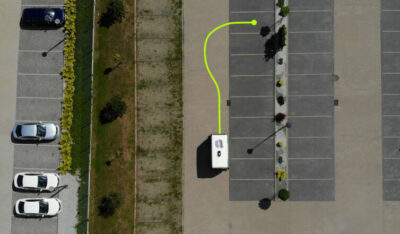
Vehicle trajectory planning
Vehicle trajectory planning is the supervisor control layer which generates the vehicle’s path of movement and its set instantaneous speed over a given section, taking vehicle’s movement model, its limitations as well as current environmental conditions (location of obstacles, predicted movement of other road users) and HD maps (including extended information about the reality, e.g., traffic lanes and relevant rules, the semantics of traffic signs) into account.
The issue of trajectory planning can also arise when predicting the behavior of traffic participants. The trajectory, however, will only be the most probable model describing the movement of a given object.